Orage Pi 3 is a really powerful development board, valid alternative of Raspberry Pi. It has a lot of different I/Os in addition respect to other dev boards clones: for example, on-board soldered eMMC (8GB), 4x full standard USB 3.0 ports, 1x USB 2.0 auxiliary port, PCI Express expansion connector, a powerful Allwinner H6 Quad-core 64-bit 1.8GHZ Cortex™-A53 and a DC input power supply connector (5V-2A).
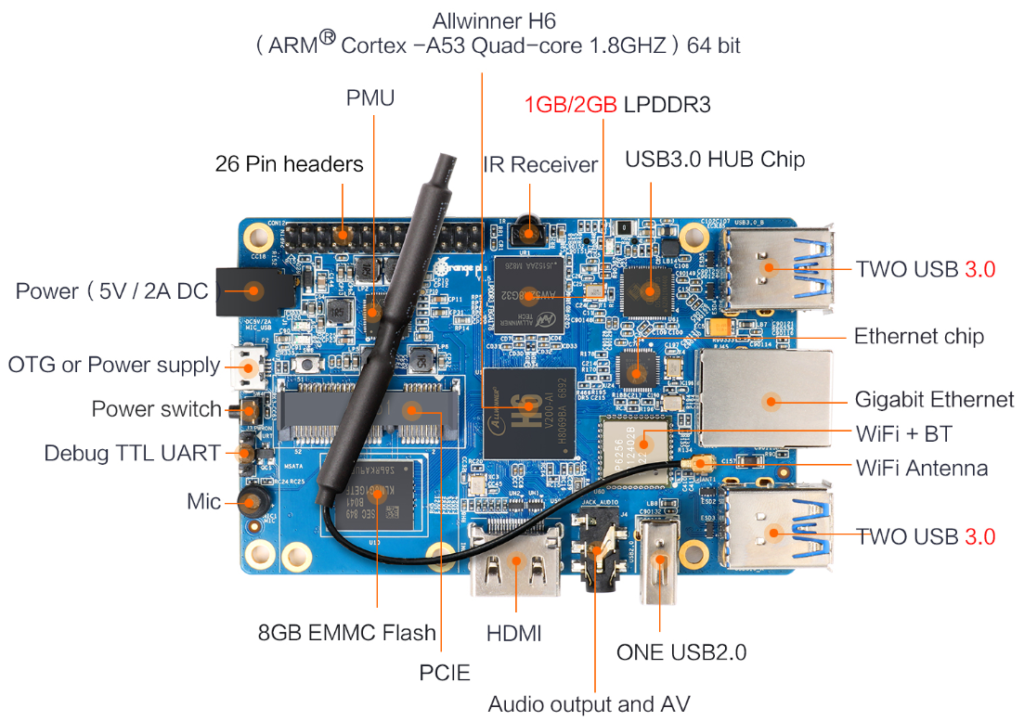
Orange Pi 3 – upper view 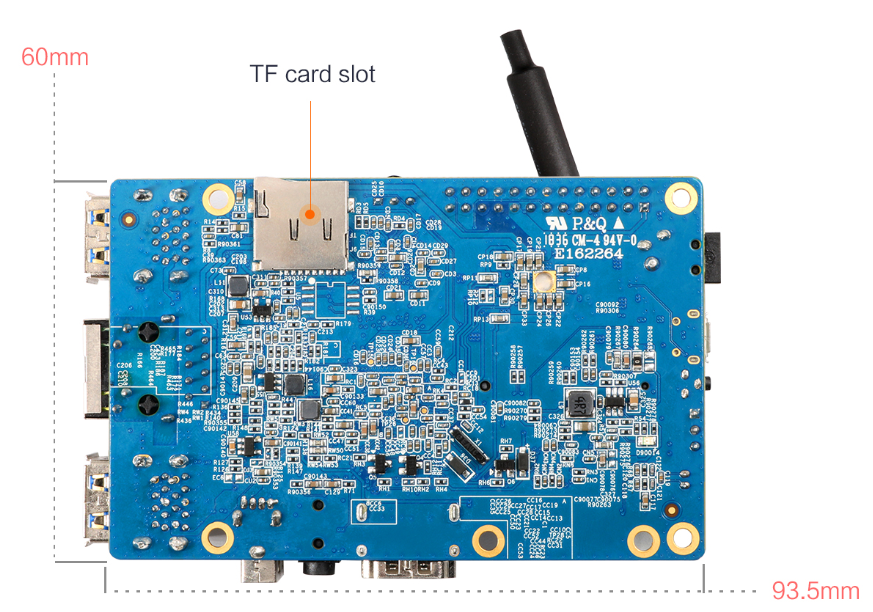
Orange Pi 3 – bottom view
Orange Pi 3 is available in 4 variants: with/without 8GB emmc and 1GB/2GB onboard RAM.
If we decide for the version missing the 8GB soldered emmc, we’ll need to use an external slower micro-SD(HC) memory, as on Raspeberry Pi.
Further details regard Orange Pi 3 can be found on the official site: orangepi.com.
Now. The idea is to install Intel OpenVINO toolkit/framework on a non-x86-based IoT platform.
What is Intel OpenVINO? It’s a toolkit that help to deploy software solutions with vision computing capabilities (aka Computer Vision, or abbreviated simply CV), and it’s based on a Convolutional Neural Network (CNN) framework. The OpenVINO distribution includes also the Intel DLDT (Deep Learning Deployment Toolkit).
Intel provides a version of OpenVINO™ for GNU/Linux OSs, but it requires a 64bit Intel processor (6th+ generation or Xeon™) and this is not our case as we are playing with a ARM-based cpu.
Otherwise, Intel has released also a 32bit ARM-based version adequate to be installed on the Raspberry Pi: so, optimized specifically to be installed on Raspbian OS and including the OpenVINO Inference Engine, OpenCV, the MYRIAD plugin and few example applications.
Specifically, the Inference Engine is the most important component as it runs the deep learning model. It is composed by a C++ library with a subset of C++ classes to infer input data (images) and get a result; and it provides APIs to read the Intermediate Representation, to set the input and output formats and to execute the model on devices.
Few last notes before starting:
- The OpenVINO toolkit was formerly known as the Intel® Computer Vision SDK.
- These steps have been validated with Orange Pi 3 (2GB RAM + 8GB on-board eMMC) but they should work also for other Orange Pi development boards.
- An internet connection is required to follow the steps in this guide.
- These steps have been validated to work with the Intel® Movidius™ Neural Compute Stick (Intel® NCS) plugged in one of USB ports but they should work without modifications with the Intel® Neural Compute Stick 2.
Required hardware
- 1 x Orange Pi 3
- 1 x microSDHC class 6+ / 32+GB
- 1 x power supply (5V 3000mA/h) with microUSB or 4×1.7mm socket
- Intel® Movidius™ Neural Compute Stick (Intel® NCS) or Intel® Neural Compute Stick 2
Method 1: using the official Debian image for Orange Pi 3
Statement of the problem here: this method was harder that expected as the official Debian image released by Xunlong Software CO. (manufacturer of Orange Pi boards) is versioned as Jessie (Debian 8) and compiled for “aarch64” architecture.
Unfortunately, Jessie is now labeled as “oldstable” and all its repository were moved to Debian Archive: this cause few issue that we’ll try to bypass with the following steps.
Ok. Let’s start.
First of all I’ll take for granted that you already have a working board with the official release of Debian 8 “Jessie” Server for Orange Pi 3 on it (image named “OrangePi_3_jessie_server_v1.0.img”). You can follow instructions in the manual to do it.
In addition, I am also taking for granted that your Orange Pi 3 is connected to the internet: we’ll need to download few files (also, date/time need to be adjusted). If not, I suggest to use nmtui to do so.
Now. As I already stated briefly before, Debian 8 is not the best as its repository seems to be not complete anymore (for example, “binary-amr64” and others are now missing). We’ll need to upgrade from Debian 8 to Debian 9 (from “Jessie” to “Stretch”) as we’ll need to install few packages from the repositories.
In the terminal of your orangepi type:
~$ sudo mv /etc/apt/sources.list /etc/apt/sources.list.old
~$ sudo nano /etc/apt/sources.listEnter the following new repository URLs:
deb http://ftp.debian.org/debian/ stretch main contrib non-free
#deb-src http://ftp.debian.org/debian/ stretch main contrib non-free
deb http://ftp.debian.org/debian/ stretch-backports main contrib non-free
#deb-src http://ftp.debian.org/debian/ stretch-backports main contrib non-free
deb http://security.debian.org/ stretch/updates main contrib non-free
#deb-src http://security.debian.org/ stretch/updates main contrib non-free
deb http://ftp.debian.org/debian/ stretch-updates main contrib non-free
#deb-src http://ftp.debian.org/debian/ stretch-updates main contrib non-free[Ctrl+X], “y” and [ENTER] to save and exit from the editor. Now we can update the repositories with:
~$ sudo apt-get update
~$ sudo apt-get upgrade
~$ sudo apt-get dist-upgradeFeel free to reboot now! Unfortunately, it seems that reboot command is not well supported by the board (at least on mine). So just shutdown and power up back the board manually:
~$ sudo shutdown -h nowTo be sure that everything worked properly, we need now to perform database sanity and consistency checks for partially installed, missing and obsolete packages through the command:
~$ sudo dpkg -C
~$ sudo apt-mark showholdHopefully you are not receiving any message by the commands above. So, keep moving! (If yes, sympathy for you: troubleshoot.)
As prerequisite, we need now to install few packages:
~$ sudo apt-get install build-essential cmake lsb-release libtbb2 libtbb-dev libtbb2-dbgNote: Cmake will be required for building the Inference Engine sample applications.
The openVINO toolkit for Raspbian OS is distributed without a proper installer, so we can download the files on our Orange Pi board:
~$ cd
~$ mkdir OpenVINOfiles
~$ cd OpenVINOfiles
~/OpenVINOfiles$ wget https://download.01.org/opencv/2019/openvinotoolkit/l_openvino_toolkit_raspbi_p_2019.1.094.tgzIn this tutorial I am using the version 2019.1.094, but I suggest to always check the latest version on Intel Open Source Technology Center.
Create the system installation folder for OpenVINO.
~/OpenVINOfiles$ sudo mkdir -p /opt/intel/openvinoNow we can step forward and decompress our downloaded archive:
~/OpenVINOfiles$ sudo tar -xf l_openvino_toolkit_raspbi_p_2019.1.094.tgz --strip 1 -C /opt/intel/openvinoIf everything went as we need you’ll find 6 new folders inside /opt/intel/openvino. Check with:
~/OpenVINOfiles$ ls -las /opt/intel/openvino/total 32
4 drwxr-xr-x 8 root root 4096 Jun 2 21:14 .
4 drwxr-xr-x 3 root root 4096 Jun 2 21:13 ..
4 drwxrwxr-x 2 root root 4096 Apr 1 12:55 bin
4 drwxrwxr-x 3 root root 4096 Apr 1 12:55 deployment_tools
4 drwxrwxr-x 8 root root 4096 Apr 1 12:55 inference_engine
4 drwxrwxr-x 2 root root 4096 Apr 1 12:55 install_dependencies
4 drwxrwxr-x 8 root root 4096 Apr 1 12:55 opencv
4 drwxrwxr-x 4 root root 4096 Apr 1 12:55 python
Modify the setupvars.sh script by replacing with the absolute path to the installation folder:
~/OpenVINOfiles$ sudo sed -i "s|<INSTALLDIR>|/opt/intel/openvino|" /opt/intel/openvino/bin/setupvars.sh
~/OpenVINOfiles$ sudo sed -i 's/armv7l/aarch64/gI' /opt/intel/openvino/bin/setupvars.sh
~/OpenVINOfiles$ sudo sed -i 's/Raspbian/Debian/gI' /opt/intel/openvino/bin/setupvars.shTo compile and run the OpenVINO toolkit applications on the board an update for the system environment variables is required, the setupvars.sh script will update them for us.
~/OpenVINOfiles$ sudo chmod +x /opt/intel/openvino/bin/setupvars.sh
~/OpenVINOfiles$ sudo /opt/intel/openvino/bin/setupvars.sh[setupvars.sh] OpenVINO environment initialized
Remember: you should run the setupvars.sh script everytime you’ll open a shell and you want to play with OpenVINO. If you want to make the process automatic you can edit the bash runtime configuration file as follows:
~/OpenVINOfiles$ echo "source /opt/intel/openvino/bin/setupvars.sh" >> ~/.bashrcUnfortunately, the default user “orangepi” is not part of “users” group on the system, so we need to patch with:
~$ sudo usermod -a -G users "$(whoami)"Now, if you own a Intel Movidius Neural Compute Stick or a Intel Neural Compute Stick 2 it’s time to attach it in one of the USB 3.0 (the blue ones) socket; then, reboot.
~/OpenVINOfiles$ sudo shutdown -h nowSwitch back on and Log In again.
To be able to perform inference on the Movidius devices, you need to set USB rules through:
~$ sudo cp /opt/intel/openvino/deployment_tools/inference_engine/external/97-myriad-usbboot.rules /etc/udev/rules.d/
~$ sudo udevadm control --reload-rules
~$ sudo udevadm trigger
~$ sudo ldconfigUnfortunately, we can not use the pre-compiled version of opencv contained in the Raspberry package. So we’ll need to compile it from its sources for the aarch64 architecture:
~$ cd OpenVINOfiles
~/OpenVINOfiles$ git clone https://github.com/opencv/opencv.git
~/OpenVINOfiles$ git clone https://github.com/opencv/opencv_contrib.git
~/OpenVINOfiles$ cd ~/opencv
~/OpenVINOfiles$ mkdir build
~/OpenVINOfiles$ cd build
~/OpenVINOfiles$ cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local ..Correcting few files written for armv7l (the cpu of the Raspberry gen 1) to be compiled on aarch64 (the cpu presents on our Orange Pi 3):
~/OpenVINOfiles$ sudo sed -i 's/armv7l/aarch64/gI' /opt/intel/openvino/deployment_tools/inference_engine/samples/CMakeLists.txt
~/OpenVINOfiles$ sudo sed -i 's/armv7l/aarch64/gI' /opt/intel/openvino/deployment_tools/inference_engine/share/InferenceEngineConfig.cmake~/OpenVINOfiles$ sudo mkdir /opt/intel/openvino/deployment_tools/inference_engine/lib/aarch64
~/OpenVINOfiles$ sudo cp -R /opt/intel/openvino/deployment_tools/inference_engine/lib/armv7l/* /opt/intel/openvino/deployment_tools/inference_engine/lib/aarch64~/OpenVINOfiles$ sudo mkdir /opt/intel/openvino/inference_engine/lib/aarch64
~/OpenVINOfiles$ sudo cp -R /opt/intel/openvino/inference_engine/lib/armv7l/* /opt/intel/openvino/inference_engine/lib/aarch64~/OpenVINOfiles$ sudo mkdir /opt/intel/openvino/python/python3.5/aarch64
~/OpenVINOfiles$ sudo cp -R /opt/intel/openvino/python/python3.5/armv7l/* /opt/intel/openvino/python/python3.5/aarch64~/OpenVINOfiles$ git clone https://github.com/fbaldassarri/opencv-sun50iw6p1.git
~/OpenVINOfiles$ cd opencv-sun50iw6p1
~/OpenVINOfiles/opencv-sun50iw6p1$ sudo cp -R lib/* /opt/intel/openvino/opencv/lib
~/OpenVINOfiles/opencv-sun50iw6p1$ cd ..To be able to run pre-trained network (for example, Face Detection or Object Detection) using the Inference Engine you’ll need to create/navigate to a directory of which you have read/write permissions. Let’s create one as subfolder of our OpenVINOfiles:
~/OpenVINOfiles$ mkdir build
~/OpenVINOfiles$ cd buildLet’s try compiling through cmake the Inference Engine samples provided by Intel inside the OpenVINO distribution toolkit:
~/OpenVINOfiles/build$ cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_CXX_FLAGS="-march=armv8-a" /opt/intel/openvino/deployment_tools/inference_engine/samples Now you can build all the samples in one shoot:
~/OpenVINOfiles/build$ make -j2Or, you can even build a specific sample within this directory, for example the Object Detection Sample:
~/OpenVINOfiles/build$ make -j2 object_detection_sample_ssdDownload the pre-trained Face Detection model, the .bin file contains the model with weights and the .xml contains the network topology:
~/OpenVINOfiles/build$ wget --no-check-certificate https://download.01.org/opencv/2019/open_model_zoo/R1/models_bin/face-detection-adas-0001/FP16/face-detection-adas-0001.bin
~/OpenVINOfiles/build$ wget --no-check-certificate https://download.01.org/opencv/2019/open_model_zoo/R1/models_bin/face-detection-adas-0001/FP16/face-detection-adas-0001.xmlGo ahead running the sample with specifying the model and a path for the input source image:
~/OpenVINOfiles/build$ ./aarch64/Release/object_detection_sample_ssd -m face-detection-adas-0001.xml -d MYRIAD -i <path_to_image>The application should output an image (out_0.bmp) with detected faced enclosed in rectangles.
Time to clean up our workspace:
~/OpenVINOfiles/build$ cd
~/OpenVINOfiles$ cd OpenVINOfiles
~/OpenVINOfiles$ rm -r l_openvino_toolkit_raspbi_p_2019.1.094.tgz
~/OpenVINOfiles$ rm -r opencv-sun50iw6p1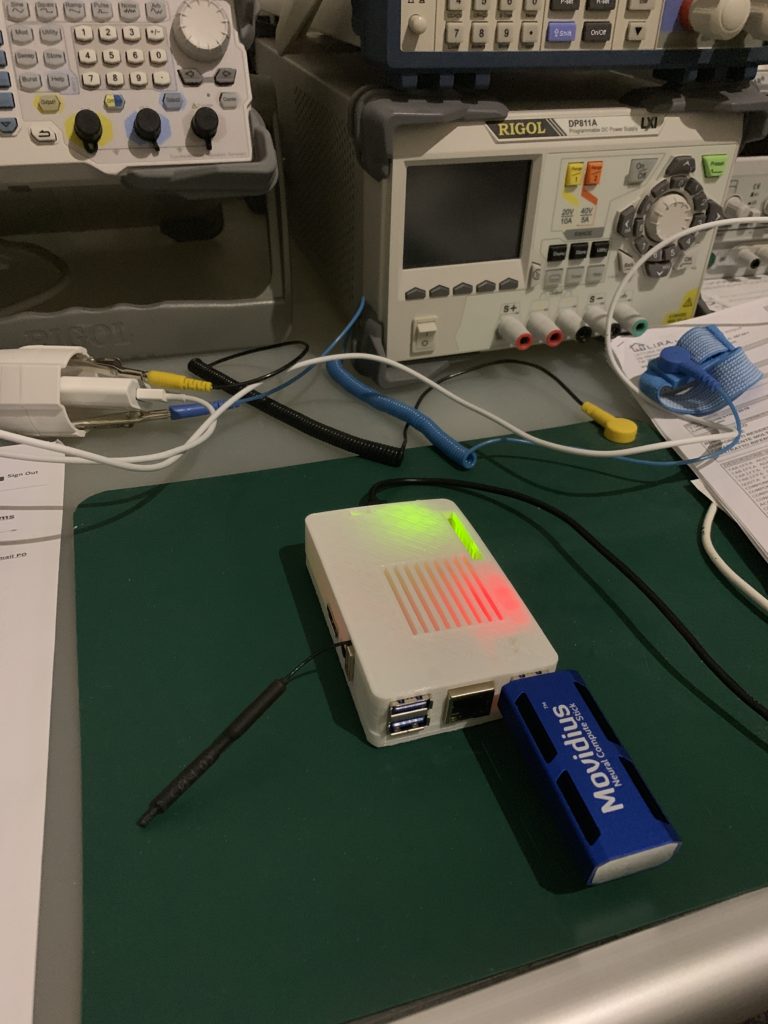
Method 2: using the un-official Armbian image for Orange Pi 3
Statement of the problem here: the image of Armbian is not official release of Xunlong Software CO. and it could not support completely all the features of Orange Pi 3 board; in addition, it still in “unstable” release. But, it is already updated at Debian 9 “Stretch” and it has few interesting tweaks.
The process is quite the same of the method 1, but first of all you need to use the latest nightly build of Armbian for Orange Pi 3 at the following link: https://dl.armbian.com/orangepi3/.
Further Readings
About Orange Pi:
- Amazing Orange Pi 3 Case by Neodyme on Thingiverse.com
- “Orangepi 3 h6 allwiner chip” thread on Armbian Forum
About Intel OpenVINO toolkit:
- Install OpenVINO™ toolkit for Raspbian* OS
- Intel Open Source Technology Center: repository for Raspberry
- Introduction to Inference Engine
- Install Intel® Distribution of OpenVINO™ toolkit for Linux*
- MYRIAD Plugin
- Install the Intel® Distribution of OpenVINO™ Toolkit for Raspbian* OS
Last Update: 2019, the June 8th